






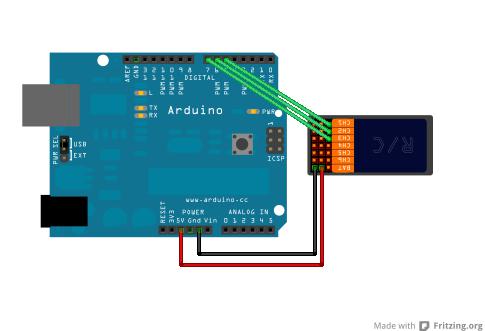

บทความนี้เป็น บทความที่ได้นำ remote rc มาต่อกับ arduino เพื่อควบคุมแบบไร้สาย
ดูจาก code จะเห็นได้ว่าง่ายครับ
อธิบาย code นะครับคุณจะใช้ กับตัวremote กี่ช่องก็ได้นะครับขึ้นอยู่กับเบอร์microนะครับ
ใช้ ขา 5 6 7 อ่านค่า PWM ที่ออกมาจากตัว recive นะครับคุณสามารถดูค่าได้ serial monitor ของ ardino นะครับ
เช่น เมื่อคุณโยกคันโยขึ้นลงของ CH1 ค่า Channel 1: ก็จะมีการเปลี่ยนแปลงนะครับ อยู่ในช่วงประมาณ 900- 2500 แล้วแต่ตัว remote ที่เราตั้งค่าตอน set remote นะครับ เพียงแค่นี้คุณก็สามารถใช้ remote rc ไปควบคุมอุปกรณ์ ตามที่คุณต้องการได้แล้วครับ
int ch1; // Here's where we'll keep our channel values int ch2; int ch3; void setup() { pinMode(5, INPUT); // Set our input pins as such pinMode(6, INPUT); pinMode(7, INPUT); Serial.begin(9600); // Pour a bowl of Serial } void loop() { ch1 = pulseIn(5, HIGH, 25000); // Read the pulse width of ch2 = pulseIn(6, HIGH, 25000); // each channel ch3 = pulseIn(7, HIGH, 25000); Serial.print("Channel 1:"); // Print the value of Serial.println(ch1); // each channel Serial.print("Channel 2:"); Serial.println(ch2); Serial.print("Channel 3:"); Serial.println(ch3); delay(100); // I put this here just to make the terminal // window happier }
//==============================================================
ตัวอย่างแบบมีเงื่อนไข
int ch1; // Here's where we'll keep our channel values int ch2; int ch3; void setup() { pinMode(5, INPUT); // Set our input pins as such pinMode(6, INPUT); pinMode(7, INPUT); Serial.begin(9600); // Pour a bowl of Serial } void loop() { ch1 = pulseIn(5, HIGH, 25000); // Read the pulse width of ch2 = pulseIn(6, HIGH, 25000); // each channel ch3 = pulseIn(7, HIGH, 25000); if(ch1>1000){Serial.println("Left Switch: Engaged");} if(ch1<1000){Serial.println("Left Switch: Disengaged");} /* I found that Ch1 was my left switch and that it floats around 900 in the off position and jumps to around 1100 in the on position */ Serial.print("Right Stick X:"); // Ch3 was x-axis Serial.println(map(ch3, 1000,2000,-500,500)); // center at 0 Serial.print("Right Stick Y:"); // Ch2 was y-axis Serial.println(map(ch2, 1000,2000,-500,500)); // center at 0 Serial.println(); //make some room delay(100);// I put this here just to make the terminal // window happier }