






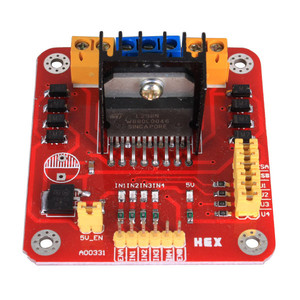
l298 drive module dc or motor driver board stepper motor driver board
| Technical Details | |
|---|---|
| L298 Datasheet | |
| Applications | 2x DC Motor Driver, Stepper Motor Driver |
| Type | Module |
| Input Voltage | 7-46V DC (if using 5V output) |
| Output Current | 2A per channel |
| Dimensions | 60mm x 55mm |
| Weight | 32g |
คู้มือ ของ drive นะครับ
http://blog.pennybuying.com/down/f/F815A.pdf
ตัวอย่างการใช้งาน
ราคา 190 บาท
Operating Instructions:
- Attach motor pins to the relevant motor terminal block(s) (see pinout below)
- Remove jumpers U2 and U4
- Apply 7-46V DC to the VMS pin on the module and connect ground to GND
- To enable bridge A (motor A) apply 5V to ENA; to enable bridge B (motor B) apply 5V to ENB
Pinout:
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||
Notes:
- ENA and ENB enable the H-bridges A and B, respectively
- Jumpers U1-U4 allow for easily tying IN1-IN4 to 5V. To allow for full control of the H-Bridges remove these jumpers. IN1 and IN2 control bridge A; IN3 and IN4, bridge B. The following example specifies control of bridge A using IN1 and IN2, but the same logic applies using IN3 and IN4 to control bridge B
- To move the motor forward: IN1=H, IN2=L, ENA=H
- To move the motor backwards: IN1=L, IN2=H, ENA=H
- To quickly stop the motor: IN1=L, IN2=L, ENA=H OR IN1=H, IN2=H, ENA=H
- To slowly stop the motor (free-run stop): ENA=L (IN1 and IN2 ignored)
- The 5V_EN jumper enables the onboard regulator
- The CSA and CSB pins are the current sense pins for bridge A and bridge B and can be used to sense the motor current. These are also broken out to jumpered headers. If not using current sense leave the pins jumpered to ground