






arduio ขับ stepping motor
ถ้าเรามี stepping motor แบบ 4เส้น 5 เส้น หรือ 6 เส้นคุณก็สามารถควบคุมมันได้
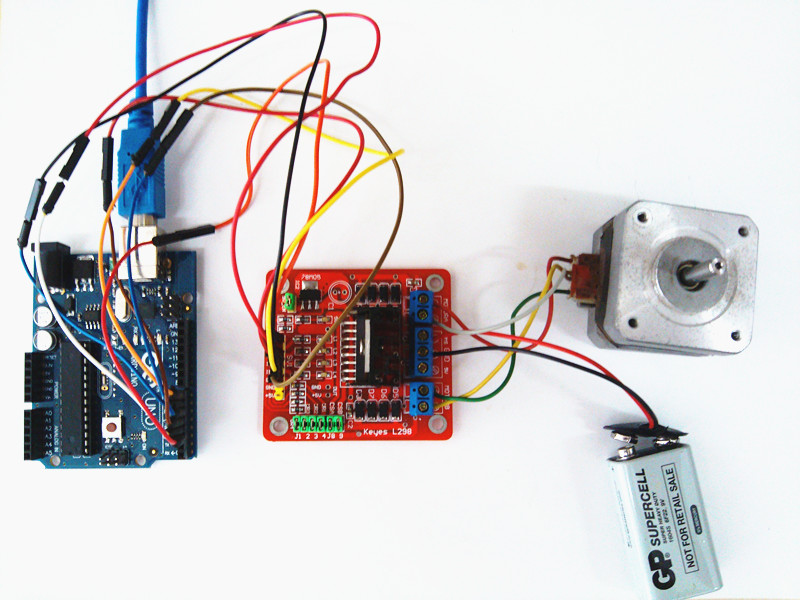
โดยใช้ l298 module ขับตัว stepping โดยใช้ บอร์ด arduino ควบคุม

| Port name | Direction | Description | Usage |
| VMS GND | / | connect to external power supply(6V~35V) | ENA(ENB) connected to H state will enable MOTORA(MOTORB) IN1(IN3) connected to 5V and IN2(IN4) to GND MOTORA(MOTORB) will move clockwise IN1(IN3) connected to GND and IN2(IN4) to 5V MOTORA(MOTORB) will move Anti-clockwise if you want to control speed you can connect the ENA(ENB) to PWM. |
| ENA | Input | TTL Compatible Enable Input:the L state disables the bridge A | |
| IN1 | Input | TTL Compatible Inputs of the Bridge A | |
| IN2 | Input | TTL Compatible Inputs of the Bridge A | |
| ENB | Input | TTL Compatible Enable Input:the L state disables the bridge B | |
| IN3 | Input | TTL Compatible Inputs of the Bridge B | |
| IN4 | Input | TTL Compatible Inputs of the Bridge B | |
| M)TORA | Output | Output of the Bridge A | |
| MOTORB | Output | Output of the Bridge B | |
| CSA(CSB) | / | use for testing electric current of Bridge A(Bridge B) | |
| UR1 UR2 UR3 UR4 | / | pull-up resistor | |
| 5V +5V | / | 5V output | |
| 5V Chip Enable Jumper | / | if connected,5V chip will work. |
ต่อขา arduino กับ l298 module ตามขาด้านล่างนี้เลยครับ
int ENA=2;//connected to Arduino's port 2 int IN1=3;//connected to Arduino's port 3 int IN2=4;//connected to Arduino's port 4 int ENB=5;//connected to Arduino's port 5 int IN3=6;//connected to Arduino's port 6 int IN4=7;//connected to Arduino's port 7 void setup() { pinMode(ENA,OUTPUT); pinMode(ENB,OUTPUT); pinMode(IN1,OUTPUT); pinMode(IN2,OUTPUT); pinMode(IN3,OUTPUT); pinMode(IN4,OUTPUT); digitalWrite(ENA,HIGH);//enablae motorA digitalWrite(ENB,HIGH);//enable motorB } void loop() {/*In the way of 4 beats to drive the stepping motor,A group connected to motorA,B B group connected to motorB,Suppose A representing the forward current of A group, A- representing the reverse current of A group,B representing the forward current of B group, B- representing the reverse current of B group. this way run as follow: AB A-B A-B- AB- or AB AB- A-B- A-B */ digitalWrite(IN1,LOW); digitalWrite(IN2,HIGH); digitalWrite(IN3,HIGH); digitalWrite(IN4,LOW); delay(10); digitalWrite(IN1,LOW); digitalWrite(IN2,HIGH); digitalWrite(IN3,LOW); digitalWrite(IN4,HIGH); delay(10); digitalWrite(IN1,HIGH); digitalWrite(IN2,LOW); digitalWrite(IN3,LOW); digitalWrite(IN4,HIGH); delay(10); digitalWrite(IN1,HIGH); digitalWrite(IN2,LOW); digitalWrite(IN3,HIGH); digitalWrite(IN4,LOW); delay(10); }